Téléopération de véhicules autonomes

En bref
Automobile, Systèmes intelligents, Cybersécurité, Sécurité et fiabilité
HEIA-FR - HEG-FR - BFH - UNIFR - Food & Nutrition Cluster - PostBus Switzerland SA - CertX SA - SBB SA - Dynamic Test Center AG - Ruag Schweiz AG - TPF Trafic SA
Roland Scherwey
Répertoire des compétences
Développement et mise en œuvre d'un concept de téléopération centralisée permettant le contrôle à distance de véhicules automatisés et connectés en fonction des exigences de sécurité et de cybersécurité
Téléopération
À ce jour, plusieurs opérateurs de transports publics ont réalisé des tests relatifs aux véhicules automatisés en Suisse. Si ces tests ont certainement permis à chaque opérateur d’acquérir un savoir-faire technique, opérationnel et organisationnel précieux, cette approche individualiste et coûteuse semble avoir atteint un seuil de rentabilité. Une solution coordonnée et évolutive pour mettre en œuvre avec succès une mobilité efficace au niveau national fait actuellement défaut.
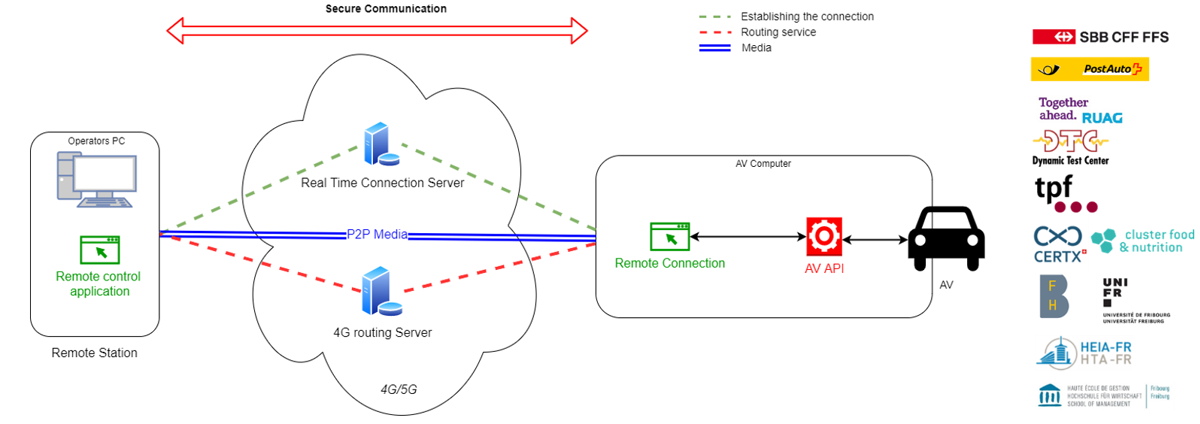
Pour mettre en œuvre les véhicules automatisés assistés par téléopération sur la voie publique, des limitations juridiques, techniques et sociales doivent encore être levées. D’un point de vue juridique, selon la Convention de Vienne signée en 1968 et les règlements fédéraux en vigueur, les véhicules ne peuvent pas circuler sans avoir un conducteur à bord. Le défi technique consiste à développer un système de téléopération centralisé qui permet de contrôler à distance les véhicules connectés tout en garantissant la sécurité (y compris la cybersécurité). Enfin, il existe des contraintes liées à l’acceptabilité sociale lorsqu’il s’agit d’utiliser la téléopération dans les transports publics, notamment de la part des utilisateurs qui ont besoin de l’assistance d’une personne physique.
Grâce à ce projet, le concept de téléopération a été prouvé à tous les niveaux (acceptabilité technique, économique, sociale et légale). En effet, l’équipe du projet a travaillé sur les algorithmes de mobilité autonome (perception, localisation, planification de trajectoire), les aspects de sécurité et de cybersécurité, la modélisation du concept et la simulation de validation des exigences. De plus, la technologie de téléopération a été développée au niveau de la preuve de concept et est maintenant utilisable. Le véhicule téléopéré a fait l’objet d’une démonstration le 18 mai, au cours de laquelle une conférence de presse a été organisée qui a attiré les principaux médias nationaux qui ont diffusé notre technologie dans toute la Suisse. En outre, des représentants des transports publics, des universités et des politiciens ont participé à la démonstration.
Les résultats délivrés sont une analyse de rentabilisation et d’acceptabilité sociale de la téléopération, un concept technique d’un système de téléopération, l’identification des fonctions de sécurité nécessaires au fonctionnement à distance, les réglages et configurations du véhicule automatisé ainsi que les critères de vérification, validation et homologation d’un système de téléopération.
Notre prochaine vision est de développer encore plus la téléopération. En fait, des opportunités concrètes ont déjà été identifiées, comme le véhicule de livraison de marchandises autonome et téléopéré, les machines de production et d’agriculture téléopérées, la gestion autonome de bus dans des dépôts supervisés par téléopération, la construction d’un écosystème pour la mobilité des personnes et des biens dans les zones d’activités et autres initiatives.