Teleoperation of autonomous vehicles

Summary
Automotive, Intelligent Systems, Cybersecurity, Safety and Reliability
HEIA-FR - HEG-FR - BFH - UNIFR - Food & Nutrition Cluster - PostBus Switzerland SA - CertX SA - SBB SA - Dynamic Test Center AG - Ruag Schweiz AG - TPF Trafic SA
Roland Scherwey
Skills directory
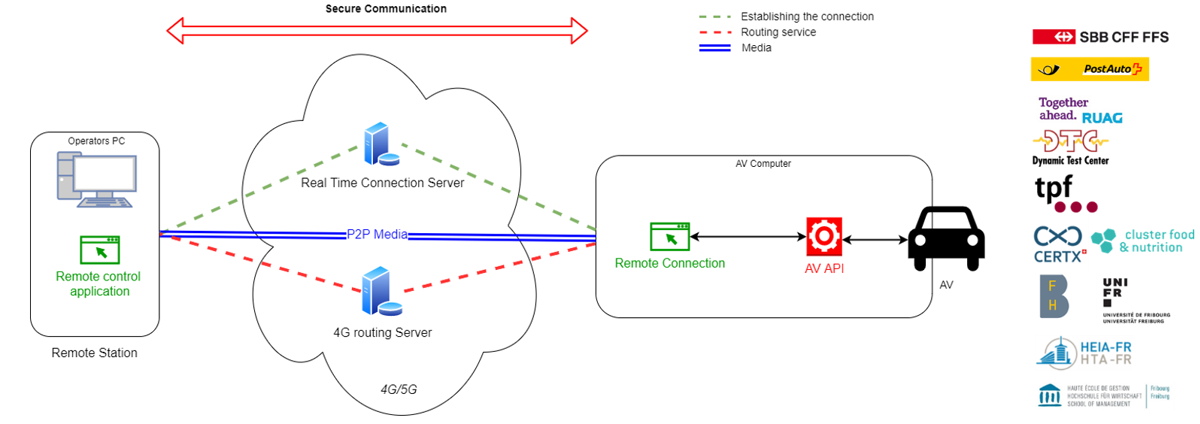
Development and implementation of a centralized teleoperation concept allowing the remote control of automated and connected vehicles based on safety and cyber security requirements
Teleoperation
To date, several public transport operators have conducted tests of automated vehicles in Switzerland. While these tests have certainly provided each operator with valuable technical, operational and organizational know-how, this individualistic and costly approach seems to have reached a break-even point. A coordinated and scalable solution to successfully implement efficient mobility on a national level is currently lacking.
To implement teleoperated automated vehicles on public roads, legal, technical and social limitations still need to be overcome. From a legal point of view, according to the Vienna Convention signed in 1968 and the federal regulations in force, vehicles cannot circulate without a driver on board. The technical challenge is to develop a centralized teleoperation system that allows remote control of connected vehicles while guaranteeing safety (including cyber security). Finally, there are constraints related to social acceptability when it comes to using teleoperation in public transport, especially from users who need the assistance of a physical person.
Project and objectives
Thanks to this project, the concept of teleoperation has been proven at all levels (technical, economic, social and legal acceptability). Indeed, the project team worked on autonomous mobility algorithms (perception, localization, trajectory planning), safety and cybersecurity aspects, concept modeling and requirements validation simulation. In addition, the teleoperation technology has been developed to a proof-of-concept level and is now usable. The teleoperated vehicle was demonstrated on 18 May 2021, during which a press conference was held that attracted major national media that broadcast our technology throughout Switzerland. In addition, representatives from public transport, universities and politicians participated in the demonstration.
The delivered results are a business case and social acceptability analysis of teleoperation, a technical concept of a teleoperation system, the identification of safety functions necessary for remote operation, settings and configurations of the automated vehicle as well as the criteria for verification, validation and homologation of a teleoperation system.
Our next vision is to further develop teleoperation. In fact, concrete opportunities have already been identified, such as the autonomous and teleoperated goods delivery vehicle, teleoperated production and agriculture machines, autonomous bus management in depots supervised by teleoperation, the construction of an ecosystem for the mobility of people and goods in business areas as well as other initiatives.