Automatiser le système de mesure de chargement ferroviaire

En bref
Rail, Model-Based Engineering, Sécurité et fiabilité, Systèmes intelligents
Article concernant le projet de recherche et de développement d'un système automatique et connecté de mesures de chargement ferroviaire, en collaboration avec Tracknet SA.
Introduction
L’Office fédéral du développement territorial prévoit d’ici 2040 une hausse de l’évolution de l’ensemble du trafic marchandises de 37% par rapport à 2010. Si l’on souhaite préserver le trafic routier, la population et l’environnement d’accidents et de dommages, il est nécessaire qu’une large proportion du trafic marchandises passe par le rail.
La recherche et le développement pour le transport ferroviaire de marchandises participent grandement à optimiser les coûts, à améliorer la sécurité et à réduire l’impact environnemental contribuant ainsi à augmenter l’attractivité de ce transport.
Dans ce contexte, le centre de compétences ROSAS, affilié à l’institut iSIS de la Haute école d’ingénierie et d’architecture de Fribourg, et la société TrackNet SA, spécialiste en fourniture et maintenance du matériel de voie ferroviaire, ont récemment terminé un projet visant à accroître la sécurité des wagons cargo lors de lourds chargements en utilisant des technologies de digitalisation. En effet, les techniques de mesure de chargements sont actuellement manuelles et chronophages et causent occasionnellement des incidents liés à une erreur humaine. Ce projet vise à développer un système automatique et connecté qui a pour avantages d’être rapide et d’accroître grandement la sécurité.
Partenaires et objectifs du projet
TrackNet est le leader suisse de la fourniture de matériel de voie ferroviaire, elle est aussi active dans la maintenance des voies. La Holding possède une forte expérience, de multiples technologies et un vaste savoir-faire dans le domaine des voies ferrées, savoir-faire qu’elle exporte dans le monde entier.
Quant à ROSAS, ses ingénieurs jouissent d’une forte expertise engagée dans les domaines de la sécurité et de l’ingénierie des systèmes embarqués.
L’entreprise TrackNet a mandaté ROSAS afin de développer un système prototype fonctionnel capable de mesurer le positionnement/le niveau des roues du wagon sur les rails et d’envoyer cette information à un système de visualisation. L’objectif est de permettre au conducteur de connaître le niveau de sa cargaison sans avoir à le mesurer manuellement. Le projet est présenté et discuté en détails dans ce qui suit.
Développement
Un wagon doit respecter les tolérances de chargement pour pouvoir partir et effectuer son transport. Ces prescriptions de chargement des wagons sont couvertes par l’ordonnance des CFF « G-35211 V.11 » qui définit un rapport de charges maximales entre chaque roue du wagon. Cette réglementation assure à l’opérateur d’être dans une plage tolérable de chargement afin d’éviter le déraillement du wagon.
La mesure actuelle d’un chargement se calcule d’après la hauteur ou l’écrasement des ressorts. Il existe des systèmes directs pour mesurer les hauteurs, par exemple des capteurs infrarouges. Or, leur bon fonctionnement dépend de l’environnement, qui peut être très contraignant. En effet, les wagons subissent des éclats de pierres, de la poussière des freins, ainsi que toutes sortes d’intempéries environnementales, la pluie, la grêle, le soleil ou encore la neige.
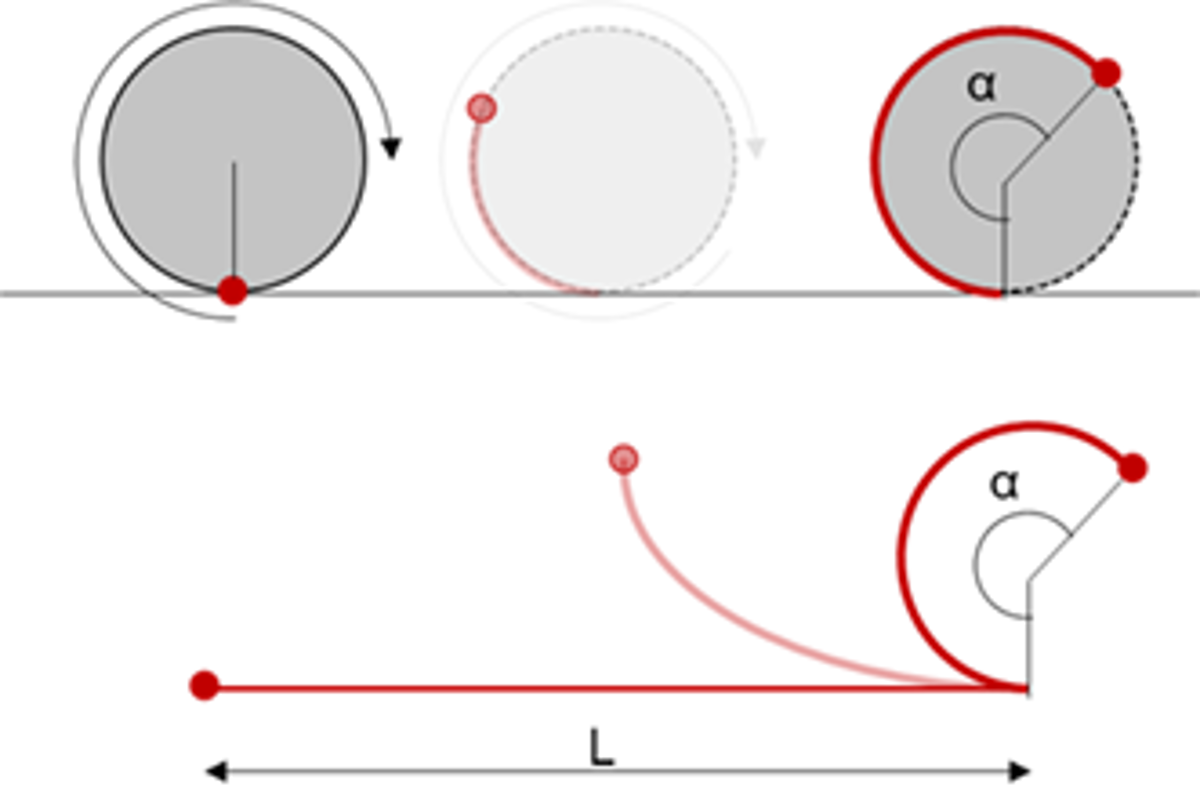
Des systèmes indirects peuvent être plus robustes pour mesurer la hauteur en passant par d’autres principes physiques. Par exemple, la rotation peut être traduite en longueur, c’est-à-dire le périmètre d’un cercle est égal à une distance parcourue soit une longueur donc une hauteur (voir le dessin ci-dessous).
Ces pratiques font appel à divers systèmes mécaniques engendrant d’importantes tolérances de fabrication et usinage pour une précision accrue. De plus, ces systèmes demanderont une calibration “on-site”, c’est-à-dire sur le wagon lui-même, lors de l’installation. Cette calibration est peu envisageable, car cela demande un arrêt prolongé du wagon, ce qui n’est pas rentable ni économiquement ni techniquement puisque chaque roue doit être calibrée individuellement.
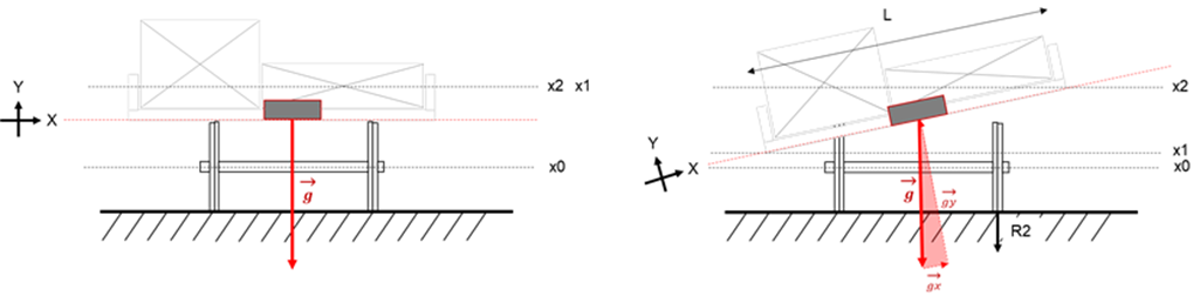
Après étude, la solution envisagée ne mesure pas directement la hauteur, mais utilise la différence d’hauteur donnée par l’angle (voir le dessin ci-dessous). Ce système indirect nécessite moins de mécanique que ceux cités précédemment, car nous mesurons la charge à partir de la pesanteur. Ce phénomène physique est représenté par l’accélération d’un objet à proximité de la Terre ou encore par la force gravitationnelle terrestre, mieux connue sous la lettre g, qui est égal à 9.81 m/s^2 (au niveau de la mer). Notre système utilise un accéléromètre qui mesure les forces d’accélération, soit la force gravitationnelle terrestre, comme le montre la figure suivante. Lorsque le wagon penche, le capteur mesure que la force g n’est plus totalement alignée sur l’axe Y et qu’il existe désormais une force sur l’axe X aussi.
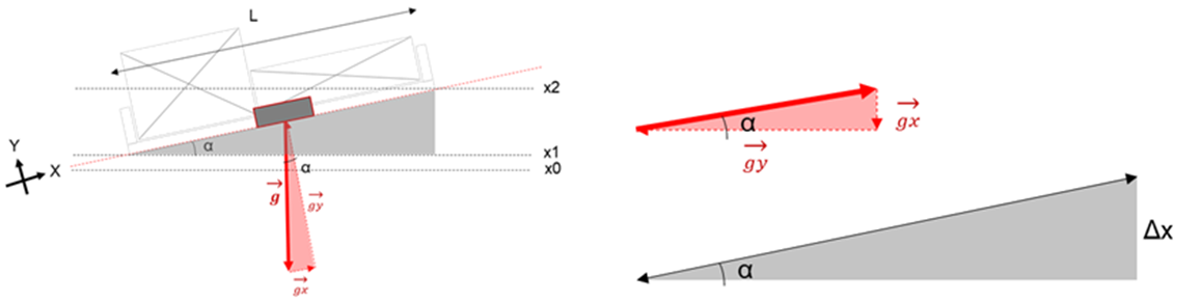
Un angle (α) apparaît. Plus le wagon est penché, plus l’angle augmente. Le théorème des triangles semblables est applicable. L’angle (α) est le même entre les deux triangles (rouge et gris), soit la différence d’hauteur (Δx) peut être calculée à partir d’un angle.
Les spécifications du système demandent des tolérances et une certaine précision dans la mesure. Il s’avère que l’accéléromètre doit pouvoir mesurer de très petits changements dans l’accélération, soit 6.8 mg (0.0068 m/s^2).
Comme expliqué plus haut, la calibration sur wagon n’est pas envisageable. C’est pourquoi la calibration doit se faire préalablement et en laboratoire, dans un environnement contrôlé. Un accéléromètre MEMS, capteur d’accélération, peut avoir de plus ou moins grands décalages et biais sur les axes. D’après leur architecture en silicium, il existe aussi des interférences entre les axes pouvant elles aussi varier en grandeur. L’équation suivante décrit ces phénomènes :
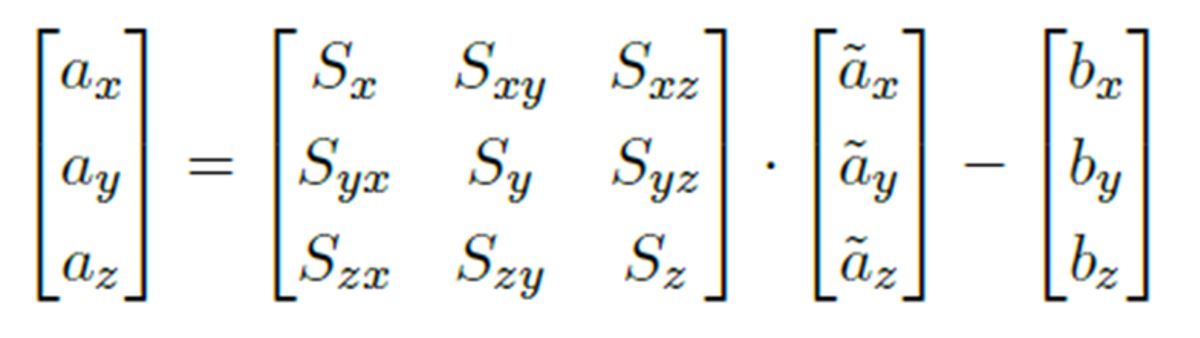
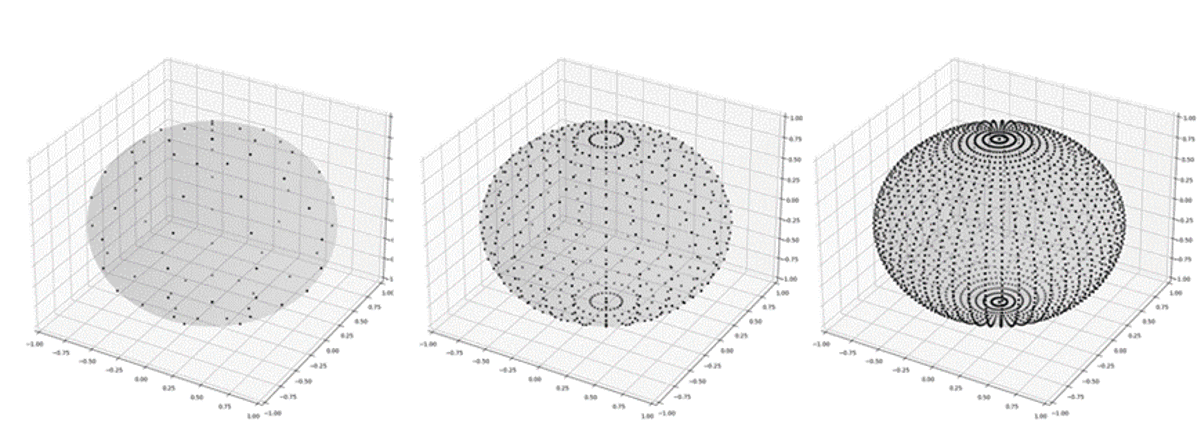
Chaque accéléromètre est mesuré et calibré en utilisant la méthode des moindres carrés pour déterminer la matrice S et le vecteur B. La précision de la calibration dépend du nombre de points pris, de leur précision et du nombre de positions différentes, soit la couverture de la sphère de calibration, comme le montre la figure suivante :
Les mesures en laboratoire confirment l’approche et les mesures sur wagon montrent des résultats prometteurs. En effet, l’erreur absolue entre les mesures varie entre 0.2 et 1.5 %. Ces mesures prouvent que le système est calibré correctement et ne nécessite pas de calibration secondaire. L’approche de mesurer une hauteur à partir d’un angle est validée. Cependant, le système mesure l’angle uniquement et non la force exercée, c’est-à-dire que les forces de frottements des ressorts ne peuvent être perçues par le système. Dès lors, le principe de mesure de hauteur n’est pas adapté à l’application.
Conclusion
Le principe de la mesure de l’écrasement des amortisseurs par la mesure de l’angle fonctionne en laboratoire et sur un véhicule. Par rapport à d’autres approches de mesures directes, il peut être installé simplement et sans calibration sur le véhicule lui-même une fois que l’accéléromètre a été calibré selon la méthode présentée.
Néanmoins, les résultats des mesures ont démontré que la mesure de la hauteur par l’écrasement des amortisseurs n’est pas suffisamment fiable à l’application. En effet, le système mesure la répartition de la charge du wagon de manière indirecte et non de manière directe avec la mesure de la force. Les mesures sur le terrain ont montré que l’écrasement est influencé par les forces de frottement des ressorts et induisent un grand nombre d’erreurs non répétitives. Ces erreurs sont suffisamment grandes pour influencer les critères de l’ordonnance de manière positive (faux négatif) ou négative (faux positif). Les forces de frottement sont dépendantes du type de ressort installé sur les boggies. En effet, au niveau des ressorts à lames, de nombreuses inconnues augmentent avec le nombre de lames tandis que le ressort spiral restreint les conditions initiales, soit un nombre moins important d’inconnues ce qui simplifierait l’élaboration d’un modèle de frottement. En conséquence, le concept pourrait vraisemblablement fonctionner pour les boggies équipés de ressorts spiraux mais est inadapté aux ressorts à lames.

Ressorts spiraux

Ressort à lames
D’autres options ont été envisagées comme la mesure directe de la répartition de la charge avec des capteurs de forces. C’est dans cette direction que le projet continuera, en reprenant une partie des développements effectués lors de cette étude, notamment en ce qui concerne la transmission des données.
Rédigé par Jonathan Hendriks et Marine Meixenberger, ROSAS